It's been a busy week in and out of work, so only been able to chip away at stuff.
I managed to get
Irrlicht compiled and linked into a VC21 example (touch example). Plus using the Insight/GDB/OpenOCD/JTAG combo to download it to the MX21 board. It took some makefile monkey'ng to get it built though. Rolling in at a wooping 18MB elf it took quite a while to download. I only enabled a stub device and display drive, but managed to step through to the Irrlicht startup code. Although Irrlicht is quite bloated with some lovely features I intend to use in the future, it's a bit too much for this initial setup work. So for the time being that side of this project is on hold.
The Pololu chassis and motor controller testing I blogged about earlier. The initial setup of the
uDSMC used the simple RS232 converter circuit described in the uDSMC manual to check all was working fine. In the week I popped into a local electrical shop and picked up a
MAX232 IC and
7805 DC/DC regulator. These are now used as the main RS232 converter for the Pololu uDSMC and chassis.
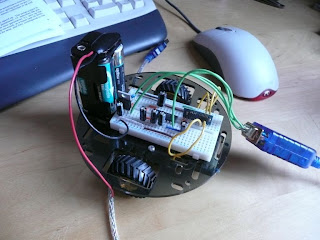
A variety of schematics were used as reference to setup this circuitry, for example;
http://www.digitalnemesis.com/info/projects/picservo/article.aspxhttp://www.flickr.com/photos/todbot/94701997/in/set-72057594051313379/http://www.iguanalabs.com/adc2051.htmThe motors are powered straight from the battery source, and the MAX232 and uDSMC are powered from the 7805 regulator. This all works very nicely, and seems more stable. So far no heat problems.
It's now possible to revist the power input for this chassis. I ran out of breadboard space to add a power LED and power switch, so need to look into that at a later date. I'm also only using half of one of the dual RS232 line drivers inside the MAX232 (to pull down the RS232 signals to TTL levels needed for the uDSMC), but it does allow for future expansion. It's now possible to add quite a variety of other TTL based devices to this circuit (e.g. sensors, alternative motor drivers). Eventually I'll transfer this to a stripboard and clean up the cabling and power connections.
Once complete I revisited the custom communication software I wrote to talk to the uDSMC. Adding to it a different way of handling cursor keys from the laptop, and using linear ramping for the speed sent to the uDSMC. Still need to revist the braking side of that code, but it was happily moving around the desk controlled from the laptop.
While setting up different software test harnesses, I had intended to start using
Eclipse as my main IDE. Annoyingly though Eclipse does some daft things. It's quite an alien IDE to me, so I've ended up ditching it in favour of Visual Studios Express Edition (again free). Creating an extensive makefile system, with proper dependency checking etc. I can now use this as a template build system for further SW development. Insight and OpenOCD are also included in this setup.
Inow have a
Subversion server running on the laptop. After many years using RCS it is now ingrained in my SW development pipelines. We currently use SVN at the company I'm working for. It's fairly nice, has it's quirks of course, but it's a lot better than VSS. Thinking about it though I could have grabbed
Perforce to handle the SCM/RCS, but then SVN and it's shell integration works well enough.
This setup actually turned out to be really simple. Head on over to
http://svn1clicksetup.tigris.org/ for a single installer based method for setting up SVN and your first repository :)
At the end of week the
CMUCam3 module arrived from
Seattle Robotics :)

Need to pop to the shops today to pickup a power connector for this, then I can check it out and have a play. Can't wait... :)








