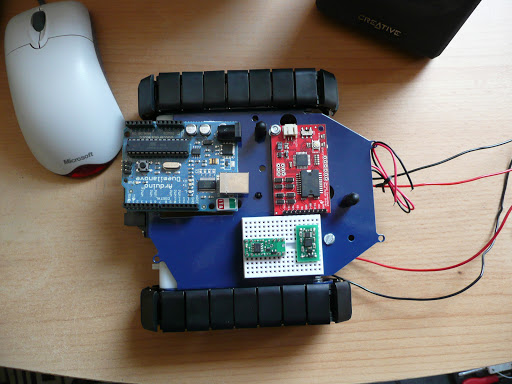
As mentioned in a previous blog entry, I have assembled the RobotShop Robot Rover for Arduino tank kit. I followed the excellent assembly video here.
On the front there is a Sharp IR sensor (GP2Y0A21YK). It's three wires (Vo, Gnd, Vcc) are fed underneath the chassis and emerge through a hole. These three wires have also had male jumper leads spliced onto them, to make it easier to test via a breadboard. The 9V battery wires, and four motor wires are also routed through the chassis.
From my first robot I have some standoffs that fit nicely to the servo mounting points on the chassis (Pololu standoffs). I also have the CMUCam3 assembled and ready for use, once the main robot is up and running. Note: that this won't be the final camera module. The CMUCam3 is just ready for me to use now. I need to get two cameras huddled on the front of Burt for stereo vision libraries.
Underneath the chassis the four 1.5V batteries and 9V battery are ideally placed to connect to the motor controller and micro controller.
On the left of the video is a hint as to the next update. The testing of the ProtoShield, IR sensor, PowerSwitch, and Accelerometer.
No comments:
Post a Comment